

The Association for Computer Aided Design in Architecture (ACADIA) conference 2016, hosted by the Taubman College of Architecture and Urban planning at the University of Michigan, is a preeminent platform to discuss design philosophies and acknowledge new realms of work done by individuals or organizations among the architectural community. The Institute for Computational Design at the University of Stuttgart's contribution to the field of computational design and architecture has been immense, and the workshop gave us valuable insight into the technology and know-how being developed at the there.
Through the seven ACADIA’s workshops, we participated in “Robotic Softness: Behavioral Fabrication Process of Woven Structures,” led by Lauren Vasey, a Research Associate from the ICD and Giulio Brugnaro, a graduate of the ITECH Master’s Program at the University of Stuttgart who is currently also pursuing his PHD at The Bartlett School of Architecture. The three day workshop was structured around the goal of introducing us to the concept of “Robotic Softness”, envisioned as a flexible and evolving framework for robotic fabrication in which the design linked with the fabrication process enables continuous feedback loops. Vasey and Brugnaro defined four main directions of investigation for the workshop as: material behavior and fabrication-informed design; scanning and machine vision; online robotic control; and behavioral fabrication strategies.
To understand the core of these concepts better, Vasey offered a brief background on the work at ICD, which included an in-depth explanation of the context of ideas behind behavioral design and fabrication methods. The presentation discussed the progression of utilizing computational design and robotic fabrication in architecture and fabrication research. The advent of new technologies including sensor feedback can challenge conventional linear ways of making and production. It was interesting to consider programming robots with behaviors in contrast to following notational systems of representation. We realized that architecture is on the edge of shifting from task-specific machinery to a more advanced generic robotic tool. This shift from machine developed for explicit fabrication processes towards flexible and behavioral fabrication tools gives designers and makers the opportunity to design and fabricate complex and intricate geometries.
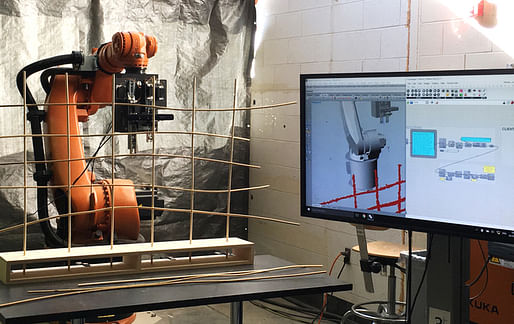
The work builds on a robotic weaving fabrication method Brugnaro developed as part of his Master’s thesis in the ITECH master’s program, with advisors Vasey and Ehsan Baharlou under the direction of Prof. Achim Menges. This robotic process allows a six-axis robot arm to weave three-dimensional woven structures inspired by the construction logic used by the weaverbird in the making of its nest. Brugnaro demonstrated a custom weaving robot end-effector tool and an integrated sensing strategy which utilized a 3D-scanning process with the Xbox 360 Kinect.
An agent-based computational system was presented that generates the robot's movements in real time. This Agent weaving system is based on two fundamental loops, local and global. Brugnaro explained the local loop deals with the direct manipulation of the material with the weaving end effector. While on a bigger scale, the global loop deals with the overall woven structure and the decision-making processes which allow different performance criteria or goals to inform development.
The workshop also touched on the topic of designing for material behavior and fabrication constraints. We used different computational methods to understand the limitations of bending active geometries while being aware of robotic constraints such as the reach of the robot. We then created a series of digital and analog hand models at a smaller scale to get familiar with the material behavior and realize form development which could then be simulated and woven on a larger scale, respecting the constraints. The wooden base on which the rattan sticks could be mounted was designed during the workshop to facilitate multiple design formations and was CNC milled overnight at the University of Michigan's FabLab.
A sensor-actuated feedback strategy was demonstrated, facilitating interaction between the robot and the environment to enable a behavioral fabrication approach. This was further explored on the second day of the workshop using scanning through the Kinect to import information of what was already constructed and stream it into the agent script. It introduced us to how an affordable gaming tool could now be used for 3D digital scanning in the design environment. Using Xbox Kinect and scanning projections of ourselves into Rhino and manipulating different parameters through the generated scripts was indeed fascinating.
Rattan, an elastic and bendable material generally used for vernacular weaving and craft processes, was used to create the woven structure. During the sequence of fabrication steps, the rattan member assumes a position which cannot be precisely controlled physically due to constant interaction and forces of its neighboring members. The system tolerances were dealt with by establishing a loop of sensor-activated feedback where information extracted directly from the real woven members was utilized by the Agent system, all developed by Brugnaro for his thesis at ITECH with Vasey as one of his advisors.
The third day of the workshop was about developing the woven structure prototype at a larger scale. There were two ways to control the density of the weaving process: either through a grayscale mapping method connected directly to the Agent script, or by using a method which moved to the closest point in the direction of movement. In both options, the woven structure is scanned by the Kinect and a point cloud is obtained and sent instantly to the agent script. Similar to the weaver bird, the robot no longer relies on a precise model of the desired outcome, but instead adds new members and governs the performance of the woven space as a result. Hence, the woven structure emerges through constant interaction between different fabrication parameters, the material property of ratan, and design intentions developed by the group.
The entire workshop was very open-ended, allowing continuous exchange of information among the participants and workshop leaders, dwelling into both technical and theoretical topics. Trajectories related to robotics were explained with real-time demos, such as the four-point calibration method used to fix static points on the robot or installation procedures for the Kinect and other hardware.

The genesis of the workshop was the realization of how robots, when equipped with other sensory equipment, are increasingly capable of sensing and interacting with the physical realm and no longer depend on a static set of machine-control instructions. An integration of design, technology and material systems emerges through the making of behavioral architecture and robotics. The process is intuitive as design transpires according to the material behavior and not being limited to the digital simulations.
Participating in the workshop was a great experience and it indeed opened ideas to explore and exploit the unique material and spatial phenomena of structures that emerge from the use of digital technology and fabrication. This fusion of technology and physical prototype is the key to the metamorphosis of architectural making, which is acknowledged by a platform like ACADIA to develop further research and strive for innovation.
Authors Drishti Haria and Layth Mahdi are currently pursuing Masters in Science of Architecture and Design with concentration in Material Systems and Digital Technologies (respectively) from the Taubman College of Architecture and Urban Planning at the University of Michigan.








2 Comments
Hi,
Do you know if there was a paper published from this workshop? I would love to see how it works under the hood.
Thanks!
I'd like to see a robots that dismantled themselves a la Tinguely's Homage to New York.
Block this user
Are you sure you want to block this user and hide all related comments throughout the site?
Archinect
This is your first comment on Archinect. Your comment will be visible once approved.