Video: http://vimeo.com/50952437
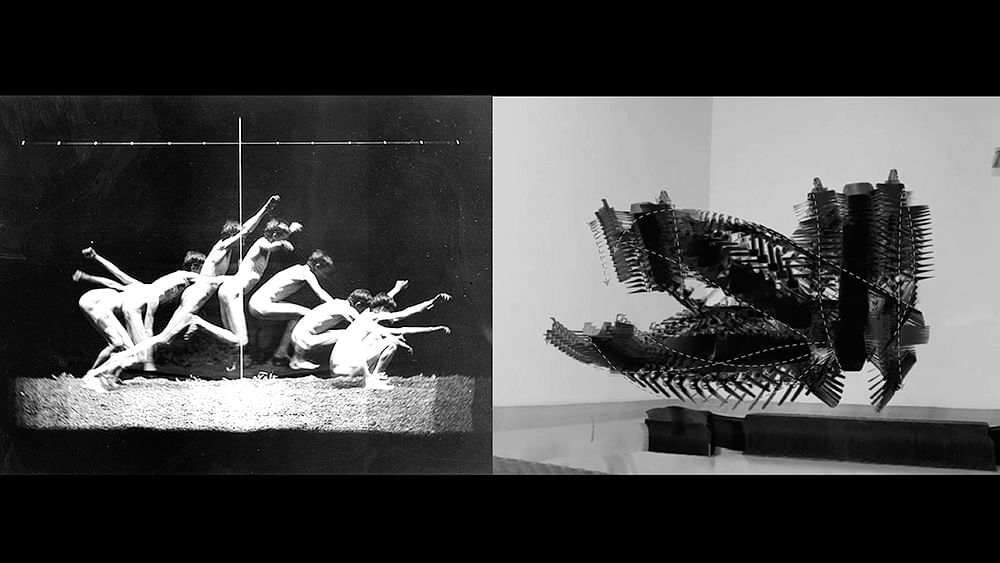
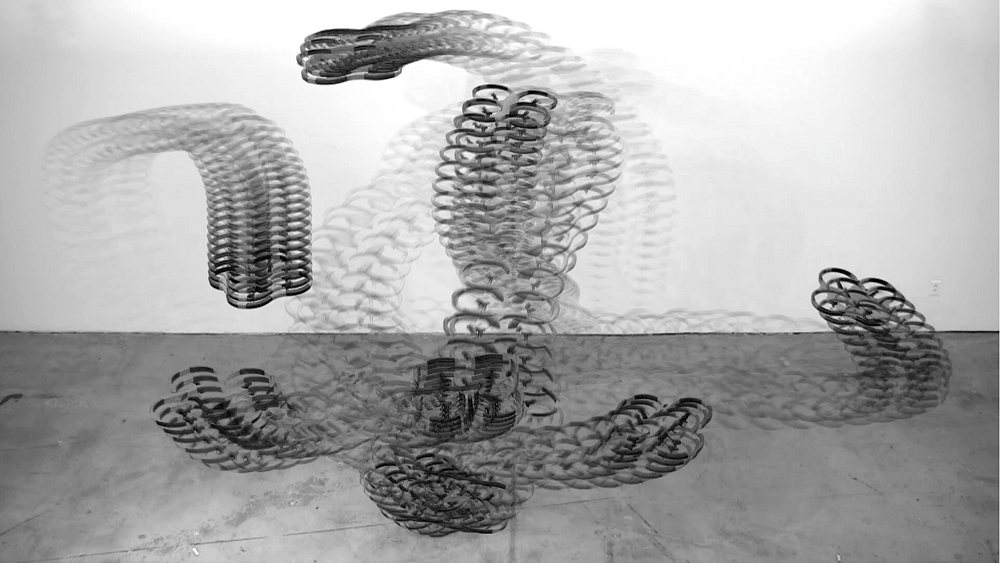
‘Flight Forms’ revisits early 90’s animation ideas of architecture in the Robotic Simulation environment of SCI-Arc. Inspired by Thomas Eakins’ Chronophotography studies of moving bodies in space our initial starting point was a ‘drone’ that can fly independently. Based on its motion, nature of behavior, and momentum we have created a 3D visual catalog, and motion library. This library was then placed in the robotic simulation environment where the flight paths were controlled to generate forms.
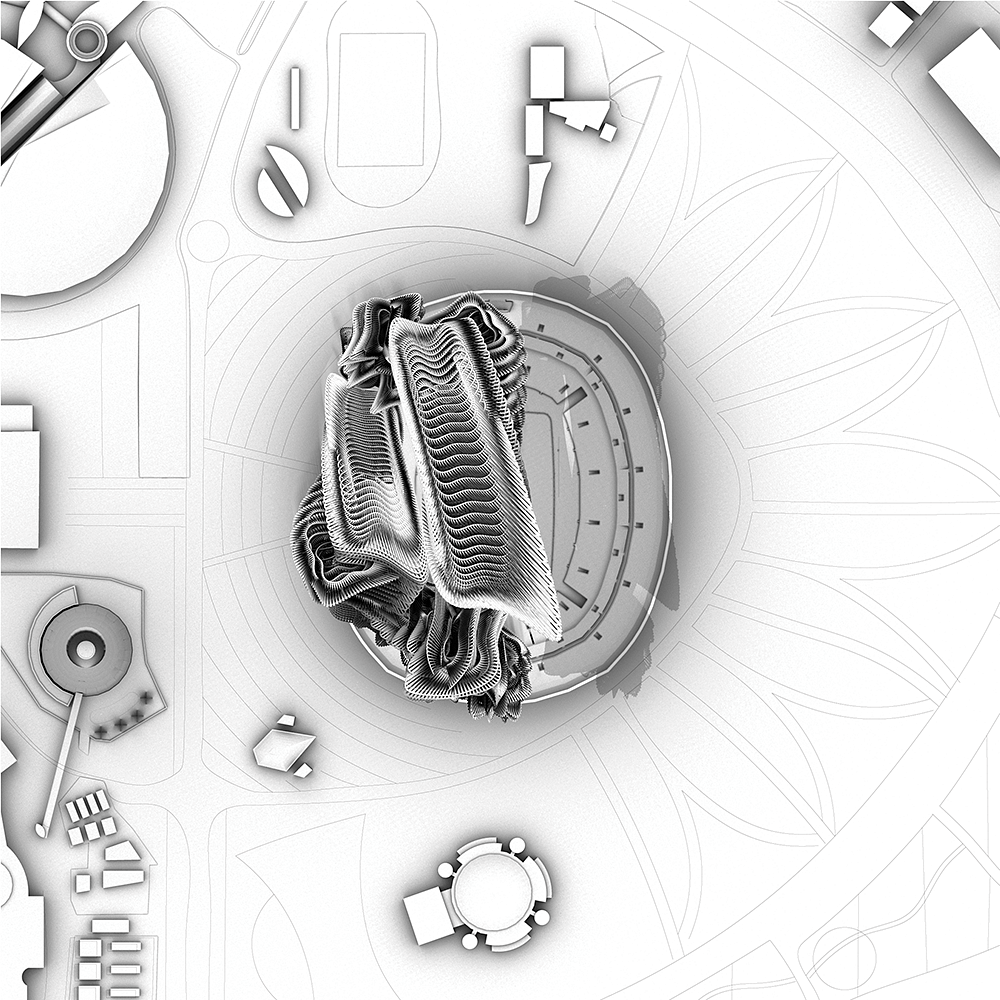
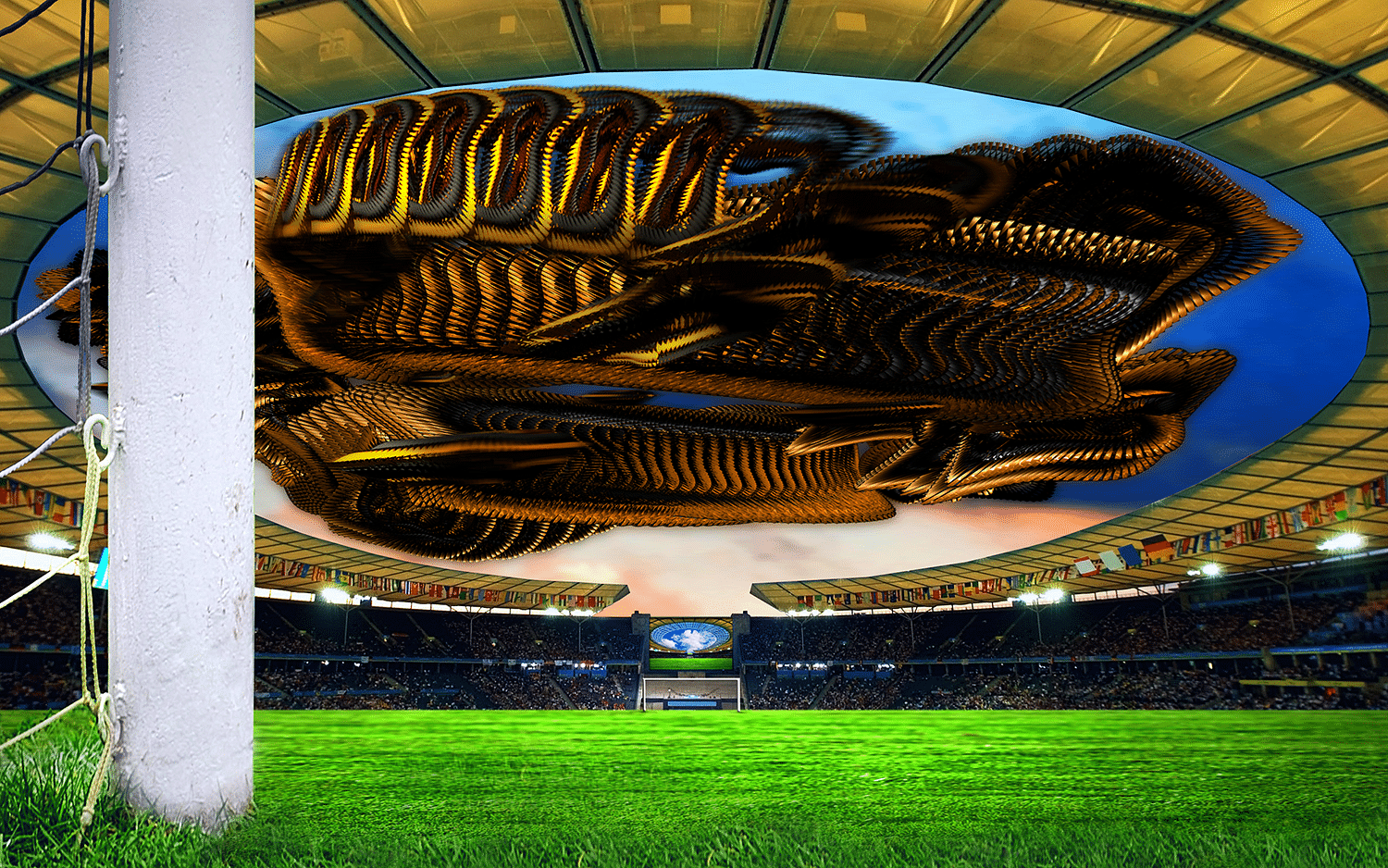
In the context of the ‘Artificial Cloud’ studio we researched broadcasting scenarios for large scale sporting events. Multiplying floating “eyes” above the stadium could open a new dimension in experiencing these events. To heighten the viewer experience this project proposes the implementation of swarming drones that function similar to spider-cams combined with techniques of bullet-time filming. Working with a combination of filmed and rendered footage, and applying multiple filming and masking techniques the drones were populated into formations operating in synchronous flight.
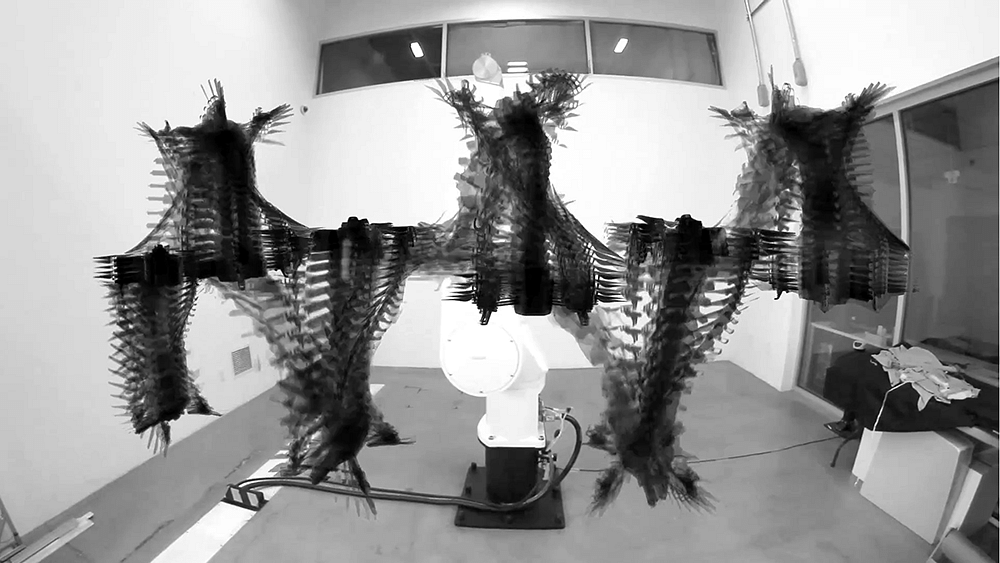
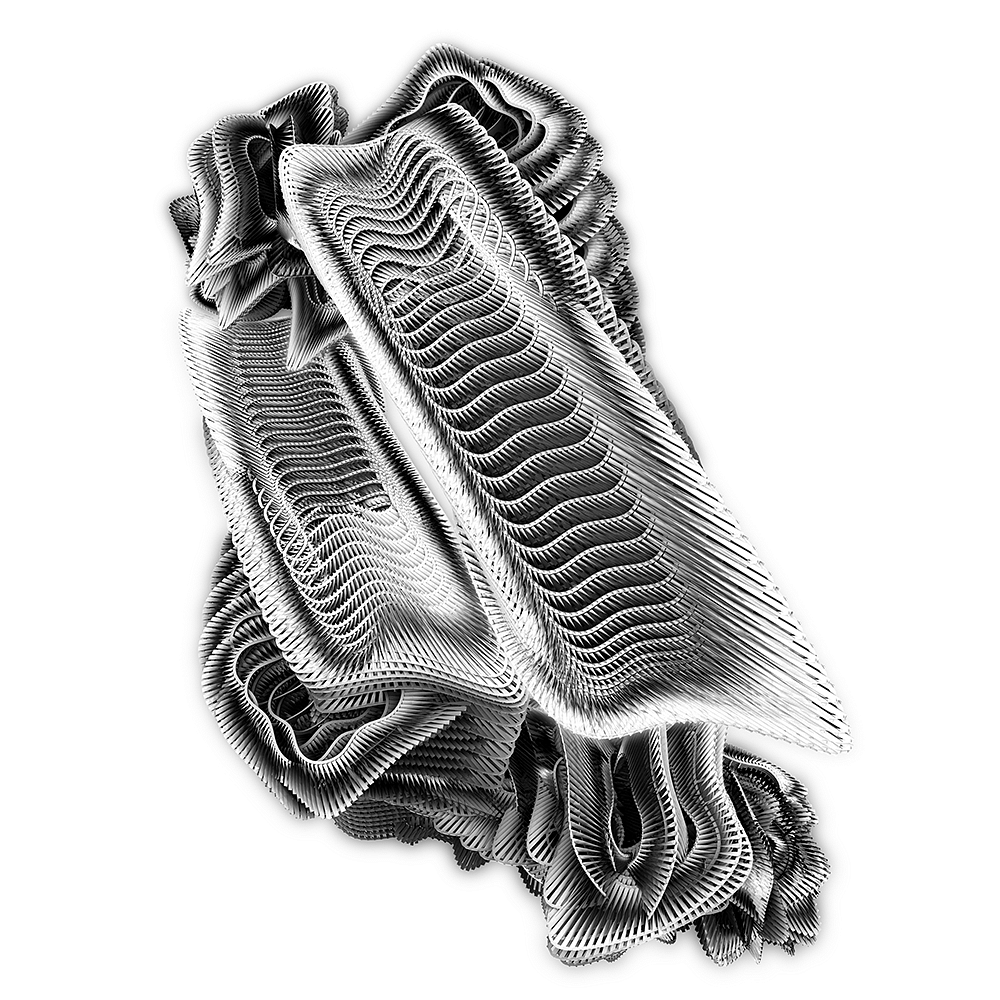
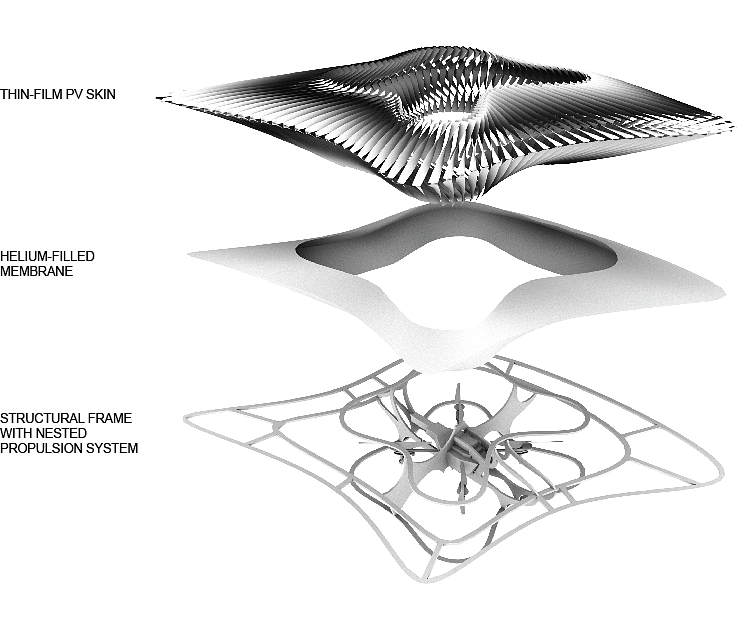
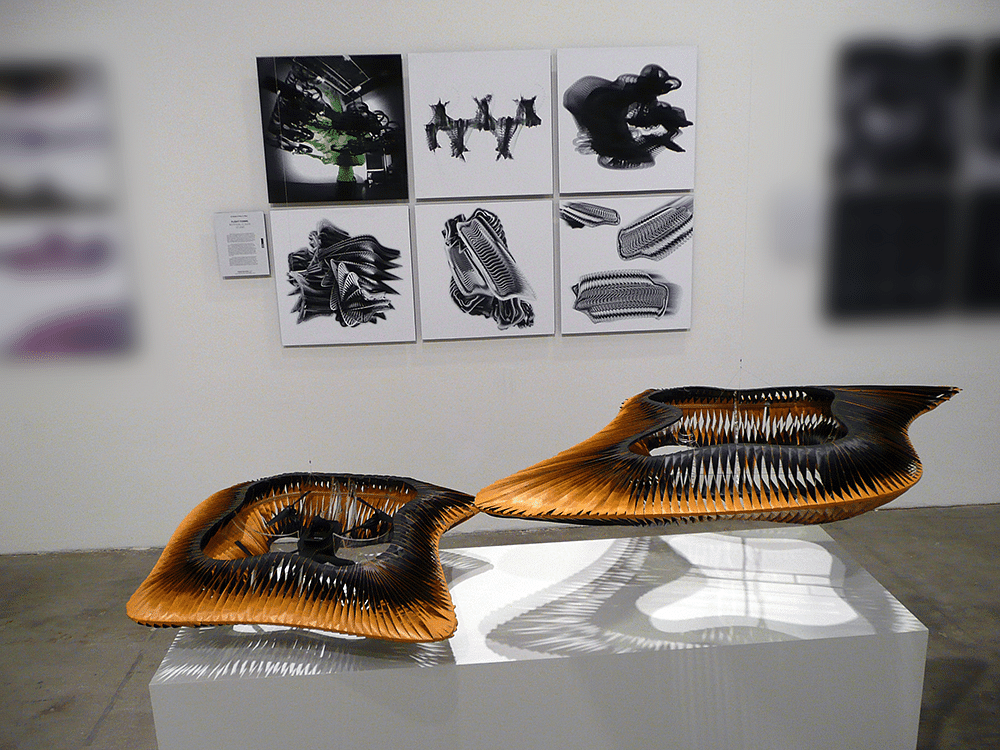
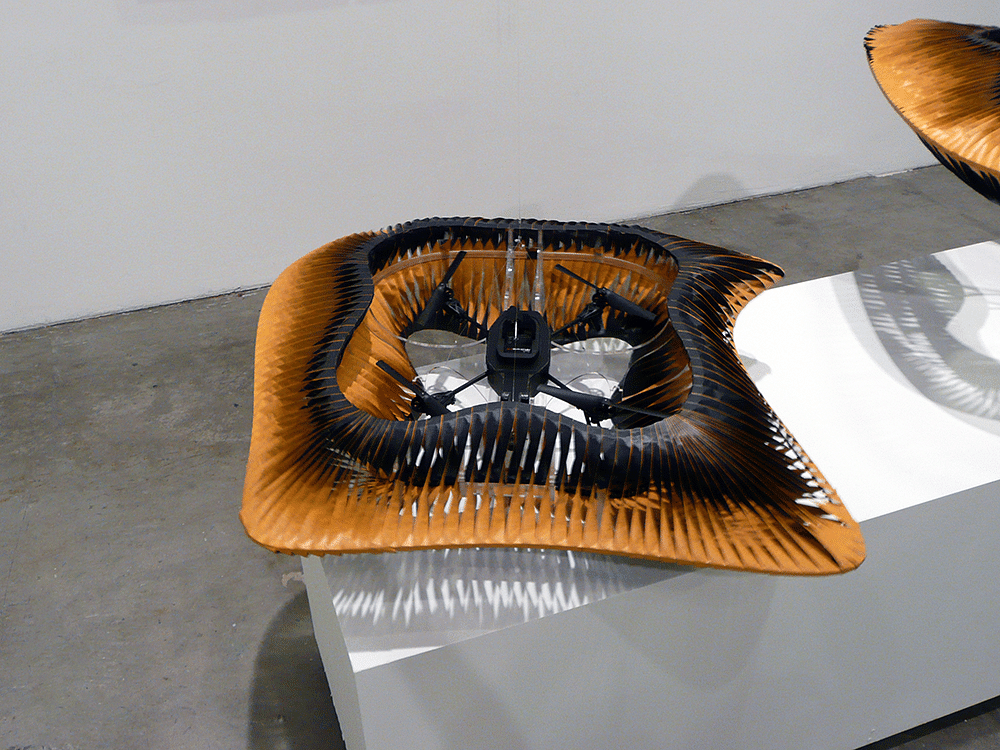
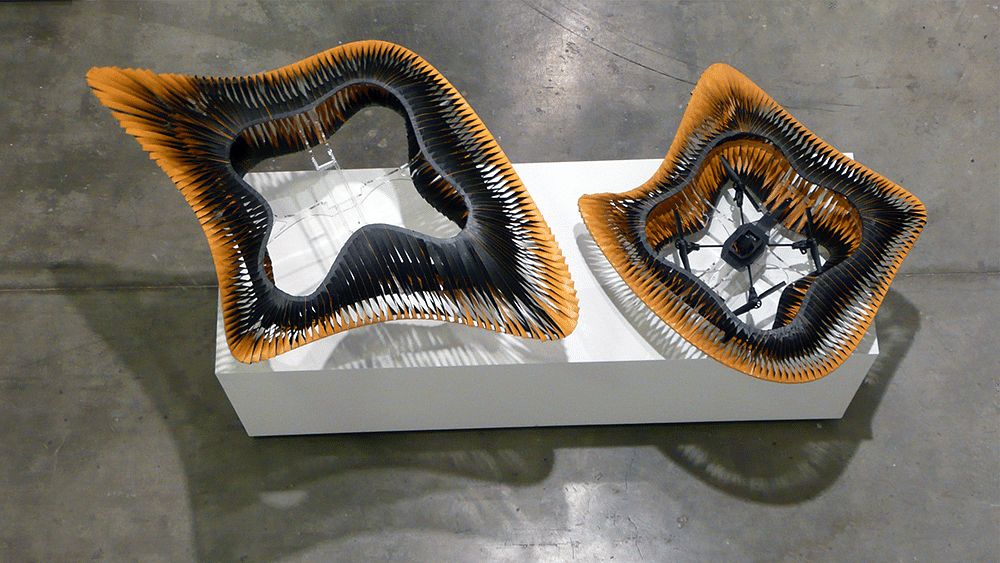
The motion analysis implied a physical manifestation strategy of stacking multiple active units. Our material research focused on refining the skin of the drone where double-sided tape and twisted surfaces were used to create a volumetric poche space around a structural frame. The twisted pattern was chosen due to its porosity at the unit level while performing dynamically at the field level. Density of the pattern is controlled by the curvature of the structural frame.
The resulting concept envisions an artificial cloud that exists partially in the physical realm and partially in spacetime.
Status: School Project
Location: SCI-Arc ESTm Studio - Summer 2012
Additional Credits: In collaboration with Peter Vikar
Studio Instructor: Marcelo Spina
Robot House Instructors: Brandon Kruysman & Jonathan Proto