
“In One Line”
I want to explore design automation, material and sensory intelligence, and robotics by employing a scenario in Fukoshima Daichi Nuclear Facility, where the facility is being augmented to graft new extensions to active sectors(not currently damaged) with both material (radiation absorbant concrete) and immaterial systems (sensors, nodes).
Project Objective[s]
I want to construct and develop a constraint-based design speculation utilizing research on robotics as part of the “labor force in a zone marked for human in-occupancy for the next 10 years. The objective is the dynamic transformation of the damaged power facility from a one way, failure prone system to a swarm based model. The context brings with it an environment which is full of needed design decisions and constraints, implying the need to describe and model the behavior of materials, machines, and quite importantly a new system absorbing and grafting onto the existing site which is capable of managing and monitoring power production from the scale of an individual sensor, a machine/ autonomous apparatus, a building component with programmed intelligence, to a building scale fragment grafted to the tissue of its precedent host. Essentially, I am interested in the design of a system which can be developed by a swarm of social autonomous machines, powered by cloud computing technology to analyze their environment, can be monitored by GPS, and can interface with the existing buildings and extend (or add) spatially in strategic locations, new tissue or envelopes to study how we can reuse the facility in a radically new way.
The plan to achieve such a condition is through the spatial analysis of the facilities programs and distribution to production zones. Here, we can find relationships among program and energy production. We can also find certain problematic or disturbing issues, such as the potentiality of the damage incurred, should one of these systems fail. Currently, the system does not have an adequate fail-safe mechanism built into it. This is not to say that there aren’t precautions taken in any facility, however considering the immense amount of power in the synthesis of nuclear energy, there is the rising concern, globally, that there needs to be more research in how we can safely monitor these activities and transactions. In parallel with these concerns and the data from previous incidences, there is an enormous amount of research being done about the future of automated construction, robotics as well as the performance of materials and their potential in intelligent systems embedded with sensors relaying and receiving data about radiation densities, phase changes and energy conversion.
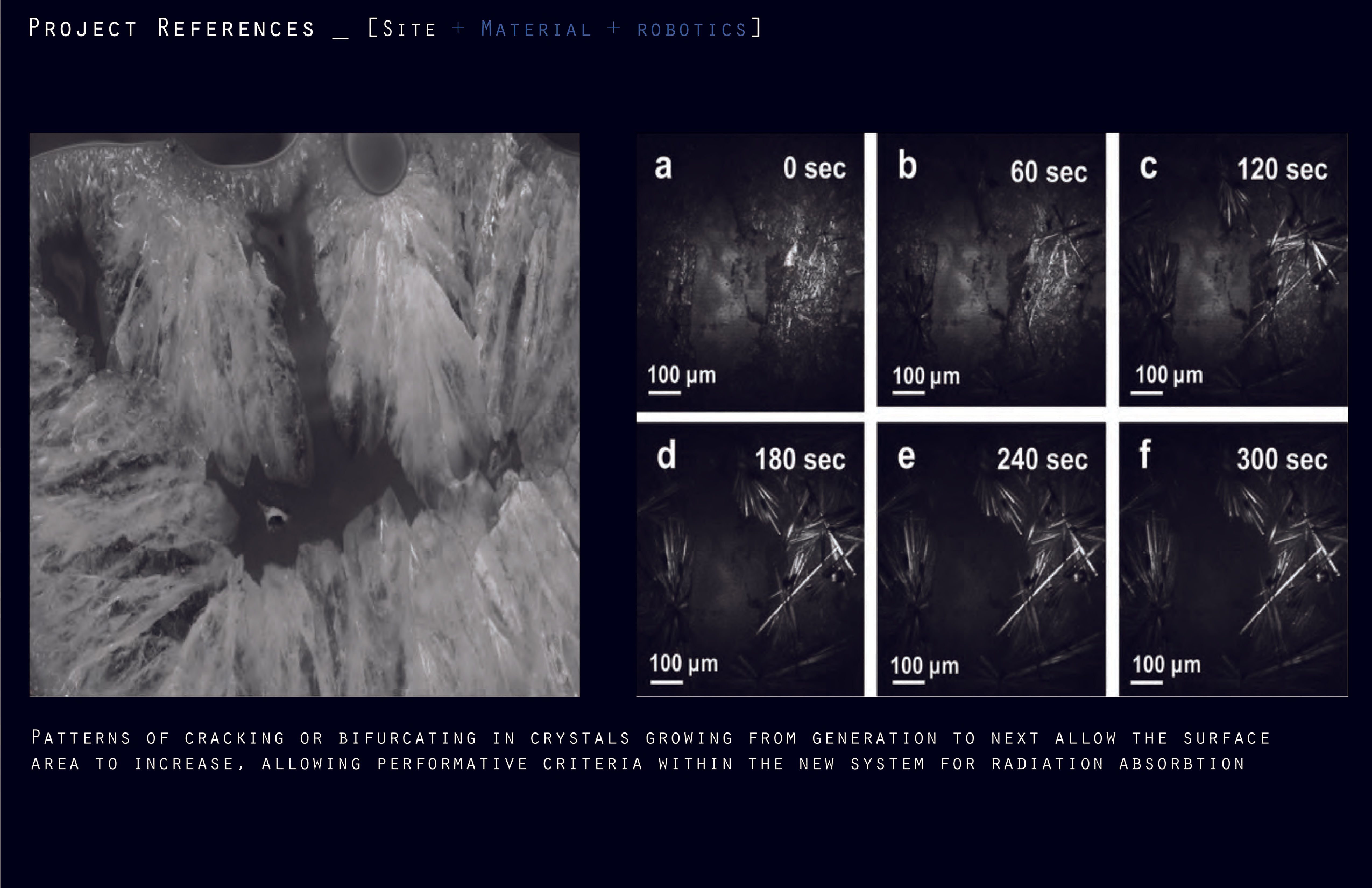
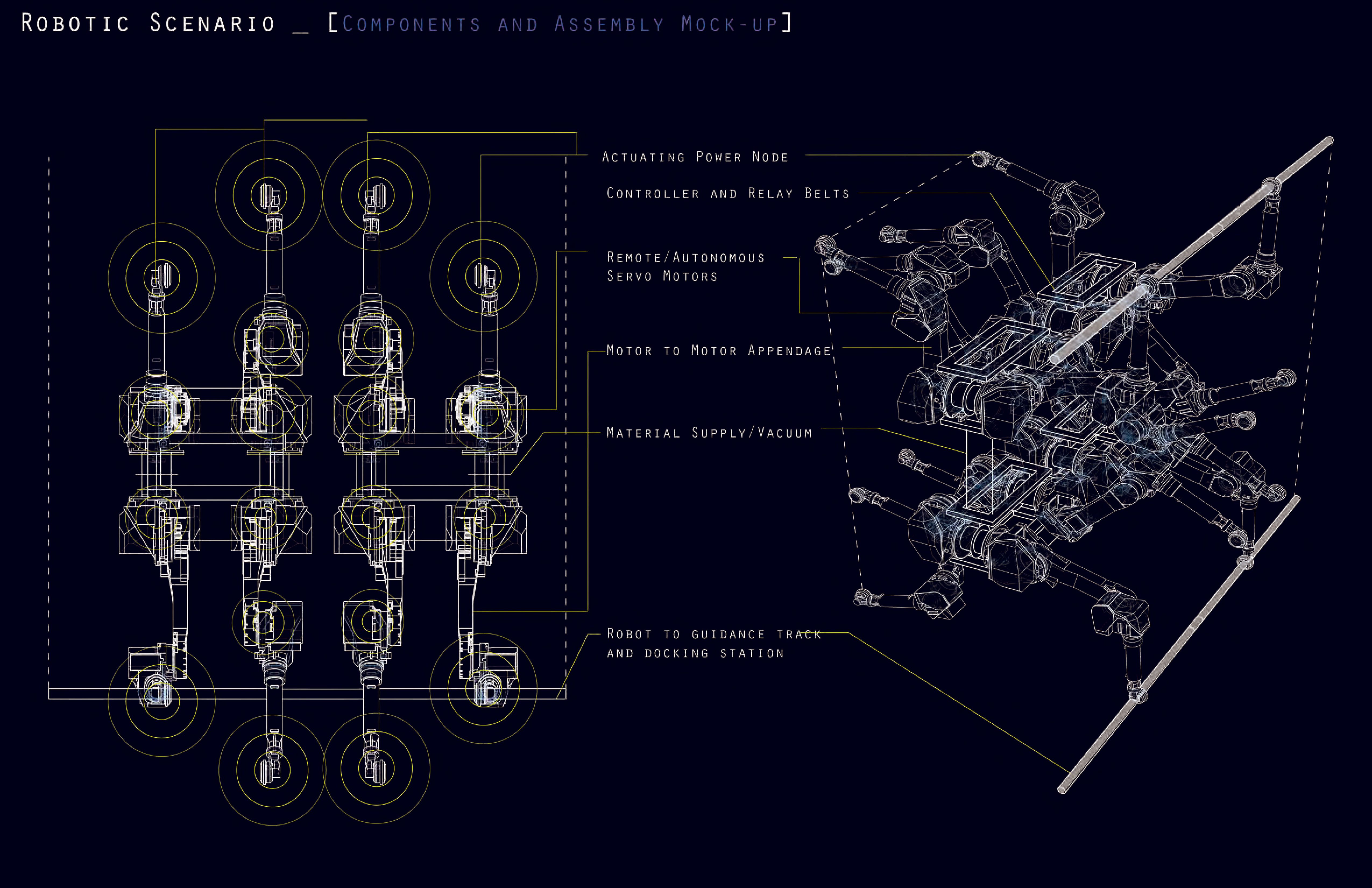
I want to produce a new portion of the facility in a location within the context where there appears to be a gap. This new portion is the deployment and energy facility for the Automated hexapodic robots. This will be there start point and they will be able to produce materials from the large amount of bio-mass infused with cultivations of algae, which have been known to crystralize cesium contaminants. The material will be a spray applied absorbant cement tooled by the machines in a recursive bifurcated geometry increasing the surface area to allow self-similarity and topological variation, yet rational in terms of panels, numerical data for the registry of the cnc/printing interface, and nodal infestation of sensors being plugged from the birfurcative intersections, creating a sensor network monitoring the status of cleanup on site(contaminants, as well as the performance in terms of internal protocols (energy production, storage, and manufacturing assemblies. The damaged sectors will be patched and coated in the panels to create a feedback system in which case multiple fail-safe switches can be triggered by the swarms of sensors. The old system will be grafted and slowly dissolved, revealing a possibility of a new type of facility with different behaviors and opportunities.
Status: School Project
Location: Fukoshima, Japan

























![[Eco]Territorial _ [Re]Configuration 2011 ('Bacterial Masonry') _ Thinkspace Ecological borders 3rd Prize entry, Tsplines Design Contest Best Student Design 2011, LA Art Walk Exhibion Models](https://archinect.gumlet.io/uploads/tc/tcewnvy1kzu4lnly.JPG?fit=crop&auto=compress%2Cformat&enlarge=true&crop=entropy&w=195&h=140 "[Eco]Territorial _ [Re]Configuration 2011 ('Bacterial Masonry') _ Thinkspace Ecological borders 3rd Prize entry, Tsplines Design Contest Best Student Design 2011, LA Art Walk Exhibion Models")











![[Robo]Pod Charette](https://archinect.gumlet.io/uploads/p0/p0d2y223ssp2frfx.jpg?fit=crop&auto=compress%2Cformat&enlarge=true&crop=entropy&w=195&h=140 "[Robo]Pod Charette")







