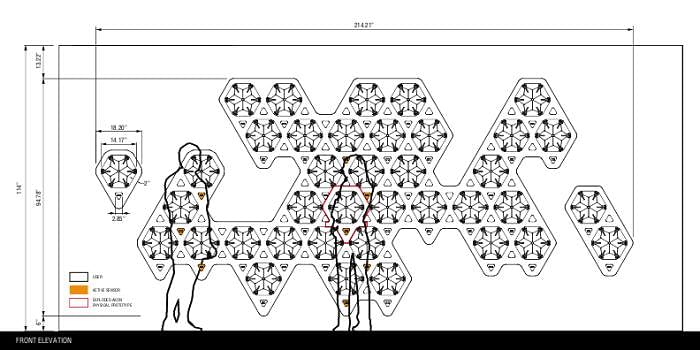
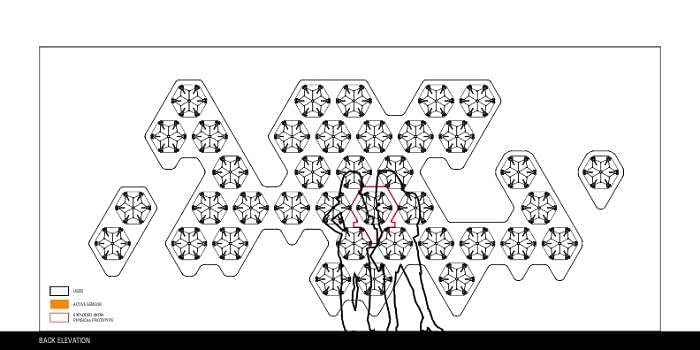
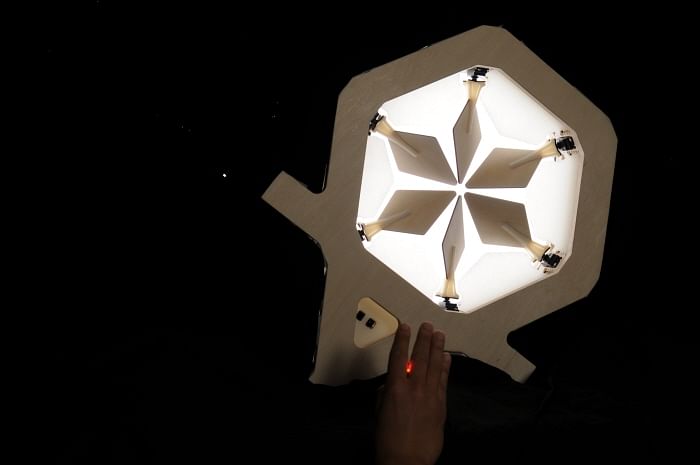
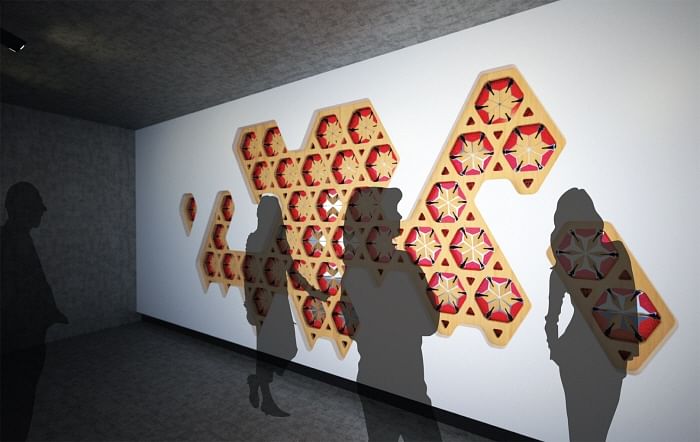
Aperactive is a mechatronic research and design project for the Master of Science in design computing open house 2012. The focus was to create an operable aperture that interactively reacted based on user proximity. The goal being a wall that allows for both opacity and transparency depending on user discretion and the division of private versus public space. The design is based loosely on the concept of a moiré which is two simple patterns that when overlaid at an angle create a third. In this context the term has been abstracted to describe two patterns of contrasting material properties that work symbiotically to achieve an enriched texture and allow for the implementation of electronic and mechanical components. The idea of the moiré in this project was not as important from a conceptual standpoint as it was a technical one.
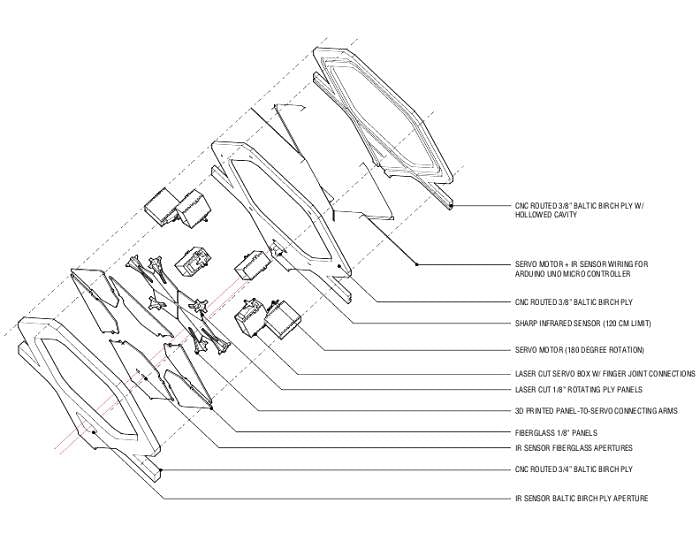
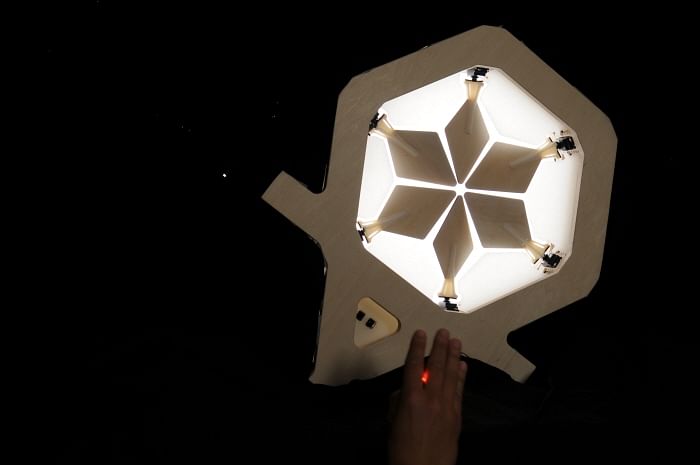
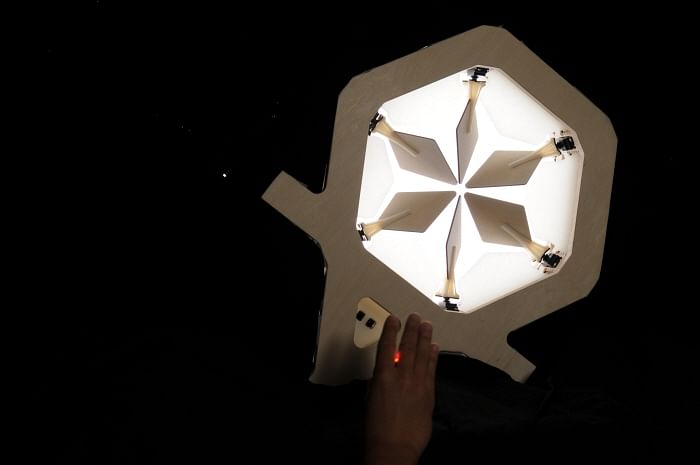
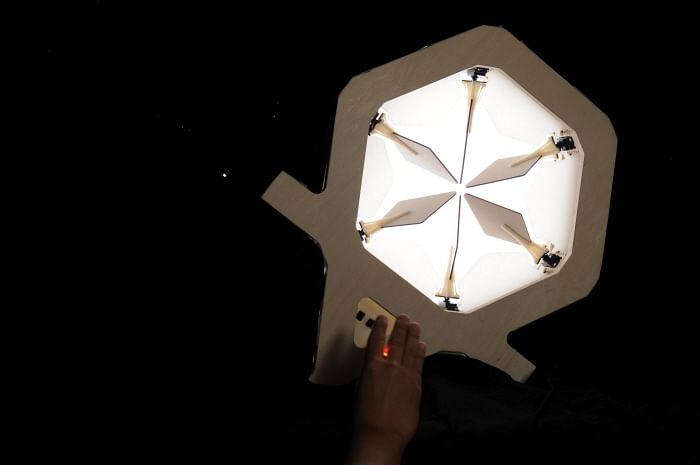
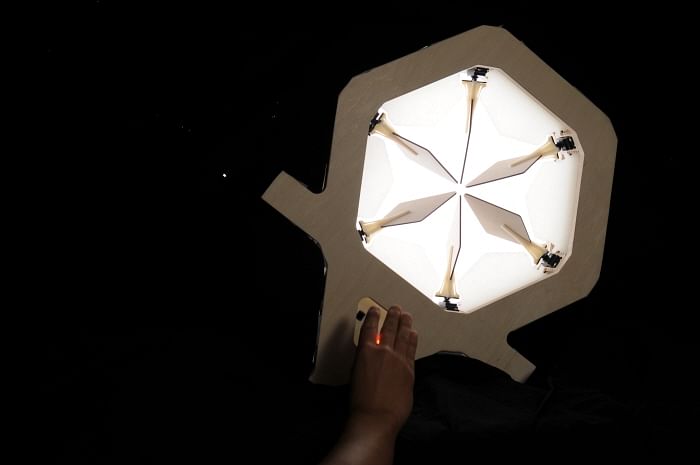
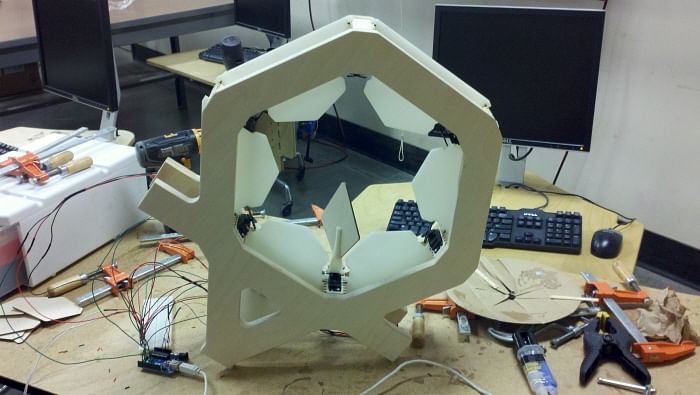
The system required that there be two layers: one to provide support and the second to physically operate. Adding the second layer of fiber glass and panels suspended between the two plywood layers gave the design the space needed for the electronic components without breaking the wall plane. Components function on multiple levels within the design. For instance, the laser cut servo boxes act to encase the servo motors while simultaneously functioning as connections tying the ply layers together and providing notches for the suspension and placement of the fiberglass. A section from the larger pattern was built at 1:1 to test the responsiveness of the system. Each hexagon contains six pentagonal panels that are driven via six servo motors. These motors are synchronized with one infrared sensor which is located directly below the hexagon so that it’s apparent how and why each user’s proximity is triggering the opening and closing of the apertures. These components are then wired to a microcontroller where their specific rotation relative to distance can be modified based on user behavior.
Status: Built
Location: Seattle, WA